Page not found!
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
Contact
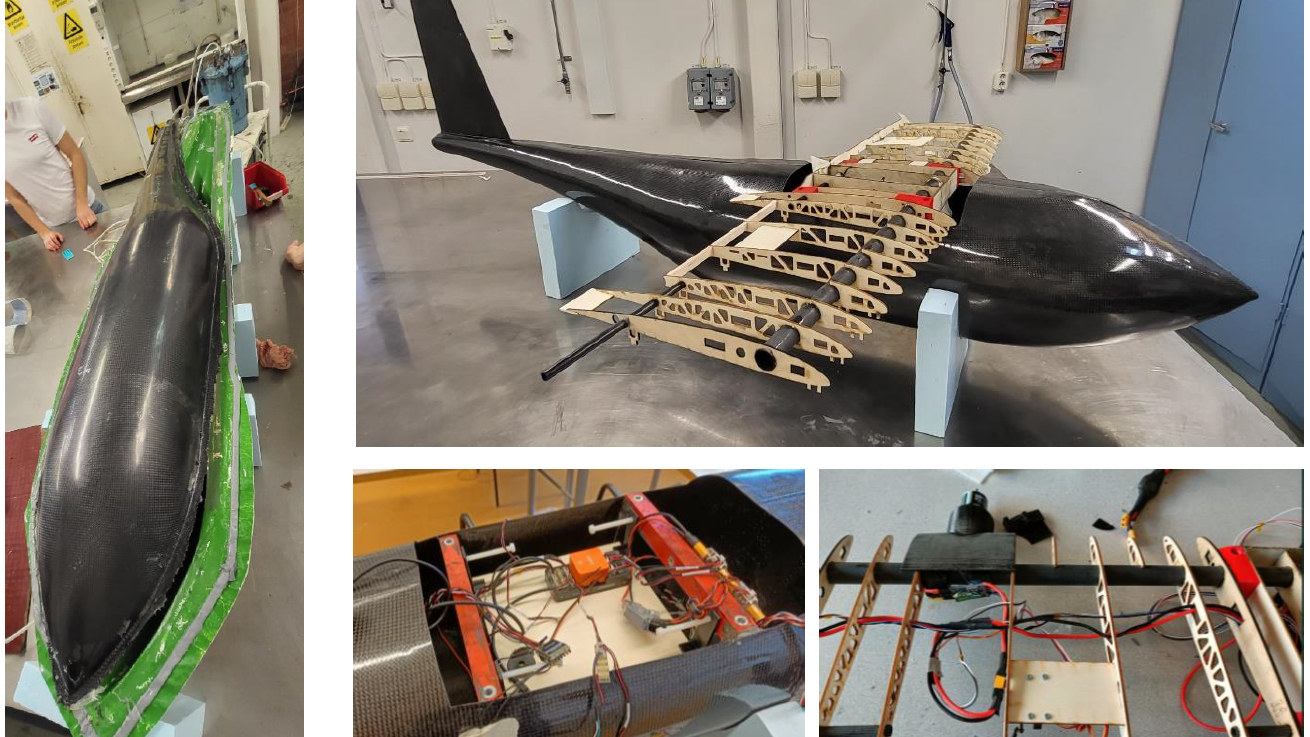
Design of an autonomous high altitude long endurance UAV to study optical phenomena in the upper atmosphere using scientific imaging instruments. Project under the KTH Space Physics department. Paper presented at ICAS 2022.

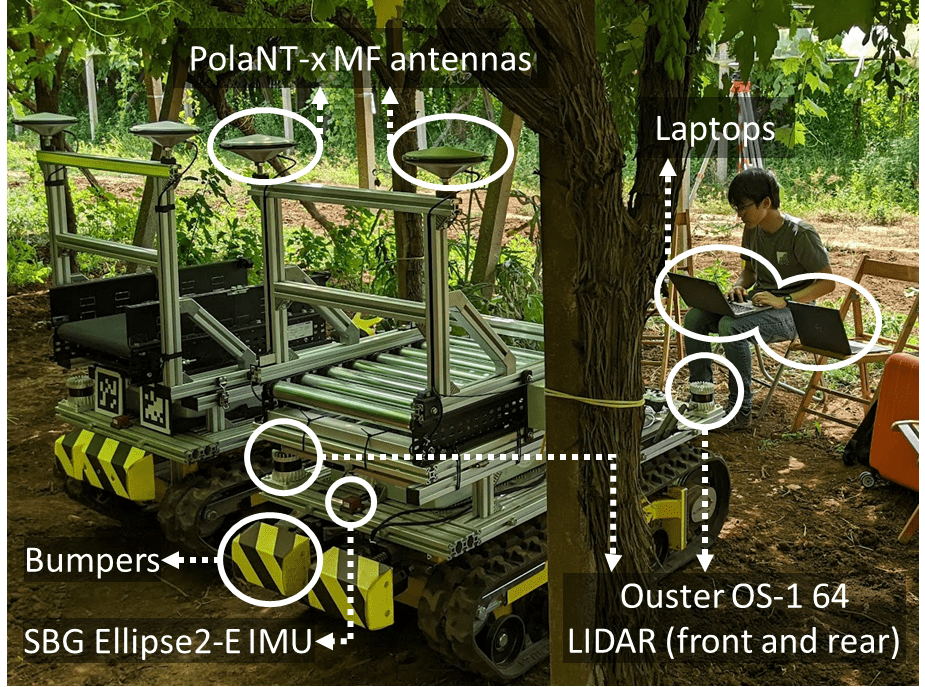
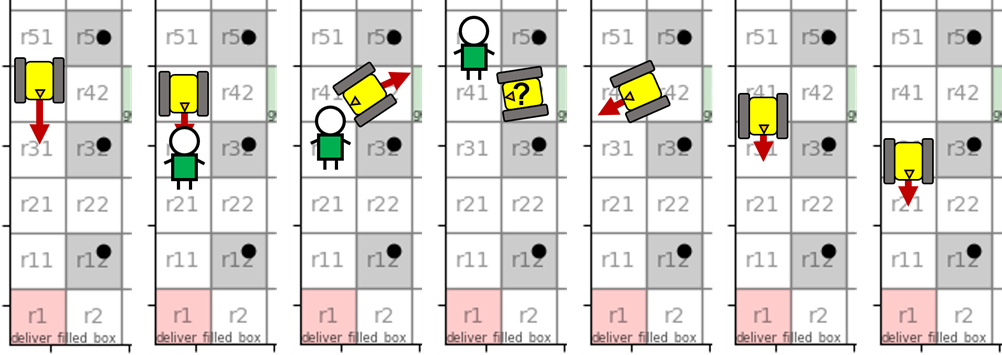
A Collaborative Paradigm for Human Workers and Multi-Robot Teams in Precision Agriculture Systems. Paper presented at CASE 2024.
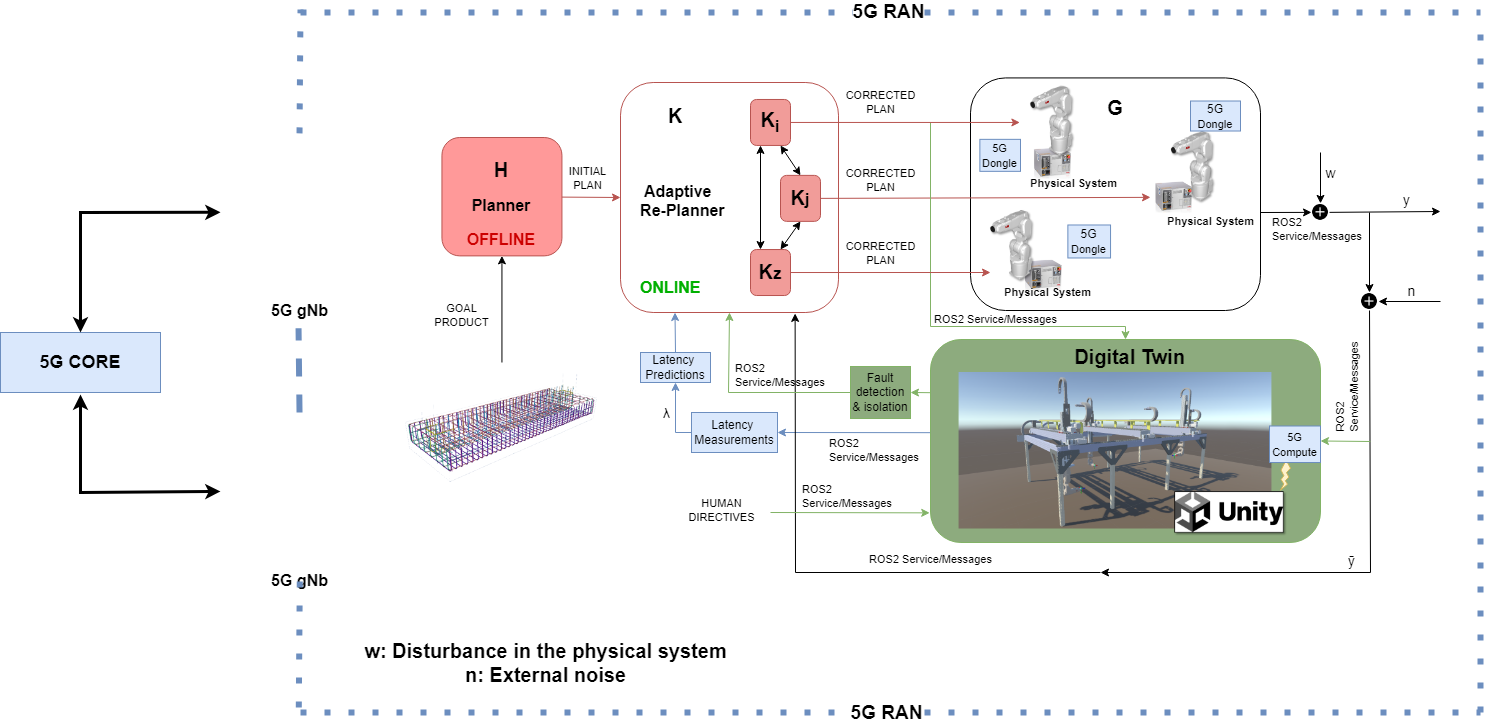
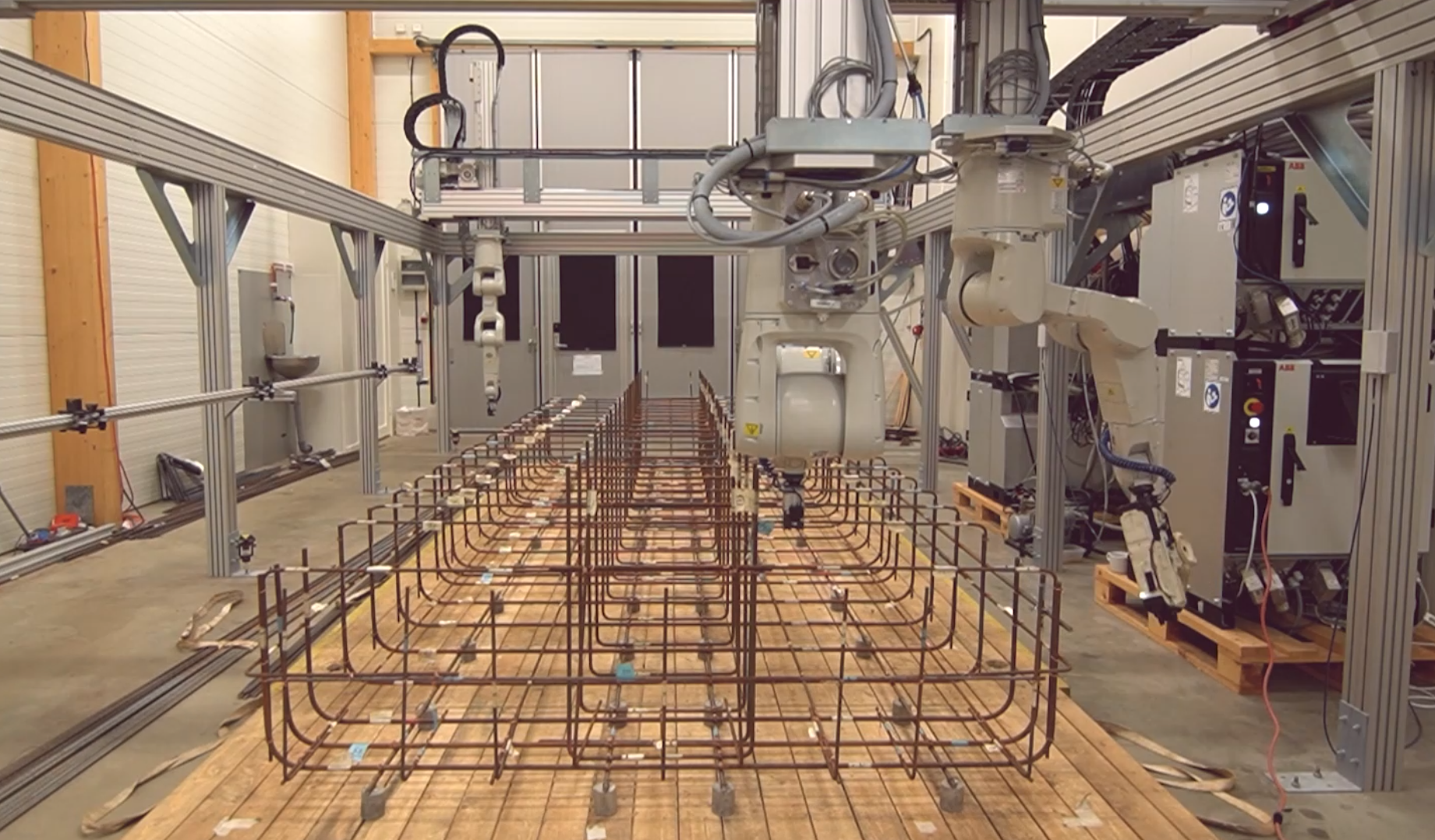
The project aims to develop an integrated digital infrastructure system to enhance the level of automation for smart construction. The initial goal will involve the creation of models for the digital twin of the robotic environment on construction sites. The digital twin will be used for remote real-time monitoring, prediction, optimization and multi-robot task planning and control. The results will be tested and applied to a practical Skanska use case.
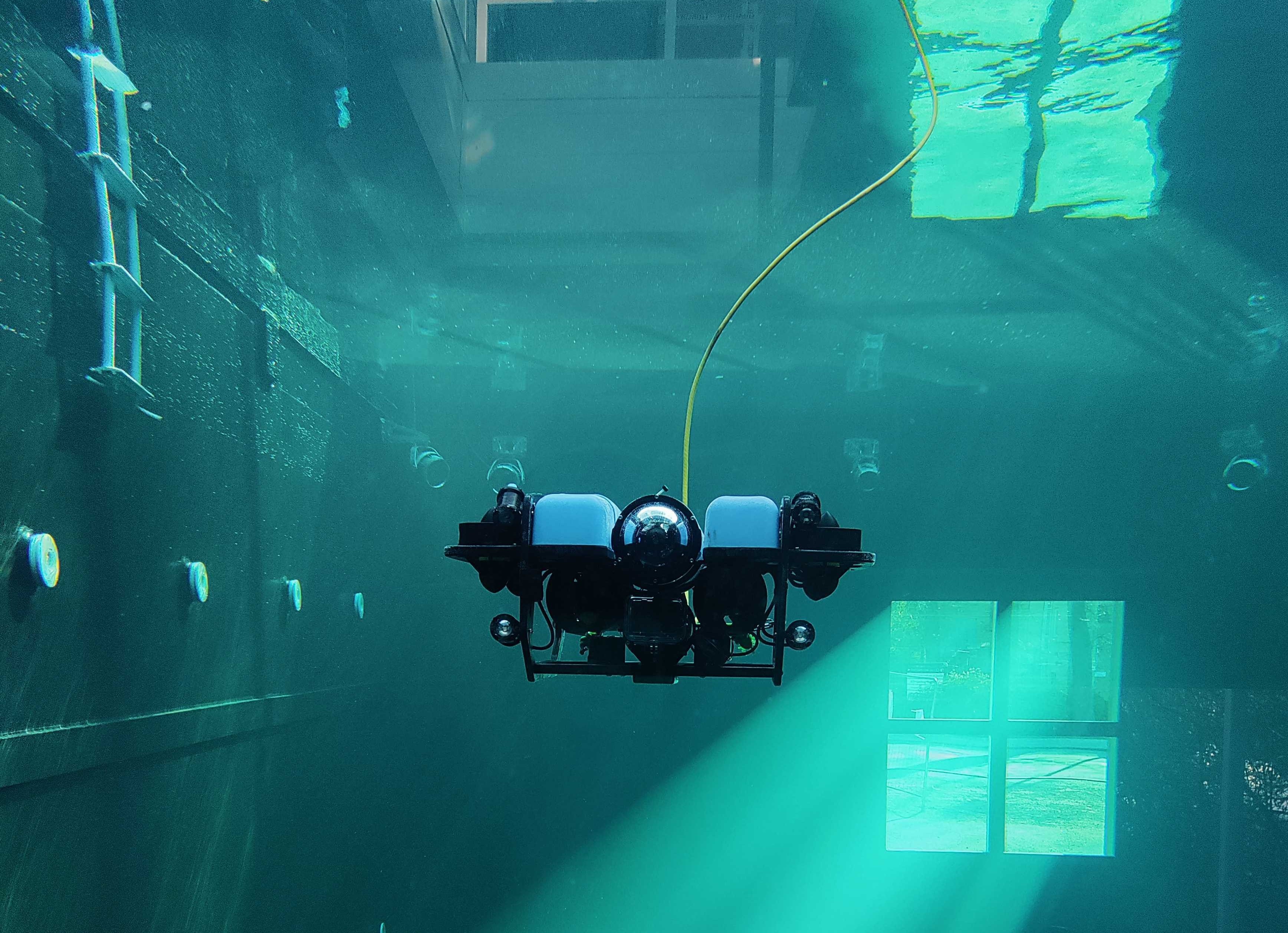
The SHARCEX project focuses on improving underwater operations by integrating advanced autonomous underwater vehicles (AUVs) with human divers. The goal is to enhance safety and efficiency in extreme underwater environments such as defense, rescue operations, and law enforcement. KTH leads the project in collaboration with FMV and Saab, aiming to demonstrate robust AUV-Diver collaborations validated through extensive simulations and experiments.

Published in International Council of the Aeronautical Sciences (ICAS), 2022
Published in KTH MSc thesis: Degree Project in Electrical Engineering, specializing in Systems, Control and Robotics, 2022
Published in International Conference on Robotics and Automation (ICRA), 2023
Published in International Conference on Robotics and Automation (ICRA), 2024
Published in Conference on Automation Science and Engineering (CASE), 2024
Published in IEEE Transactions on Automatic Control (TAC) (submitted), 2025
Published in KTH Licentiate thesis, monograph, 2025
Published in International Conference on Robotics and Automation (ICRA), 2025
Published in European Journal of Control (EJC), 2025
Published in Animum startup - Fronta - Technical report, 2025
Published in IEEE Transactions on Systems, Man, and Cybernetics: Systems (TSMC), 2026
Published in IEEE Transactions on Field Robotics (TFR) (submitted), 2026