SHARCEX – Synergistic Human-Robot Collaboration in Extreme Environments: Simulation to Experimental Validation Permalink
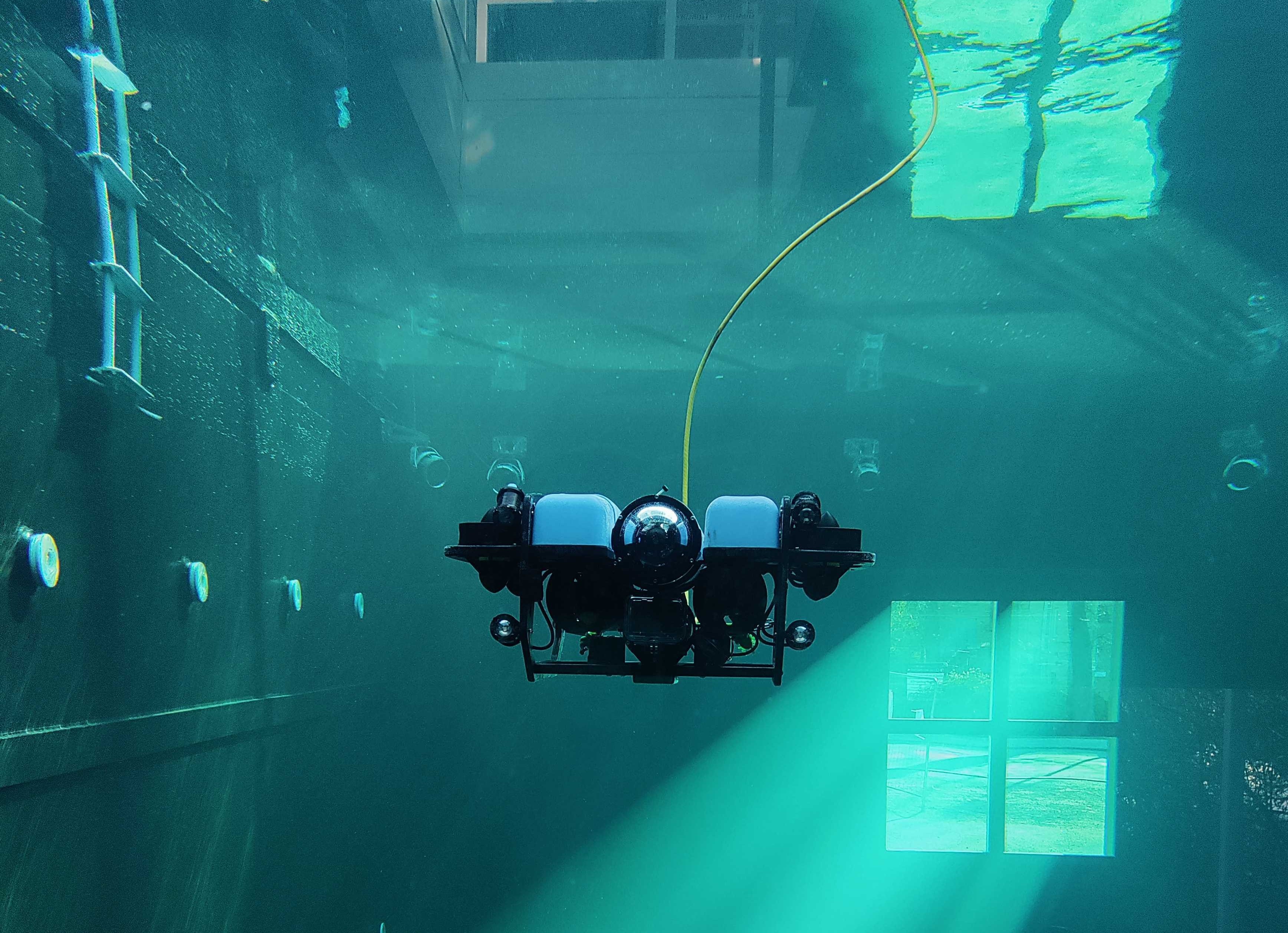
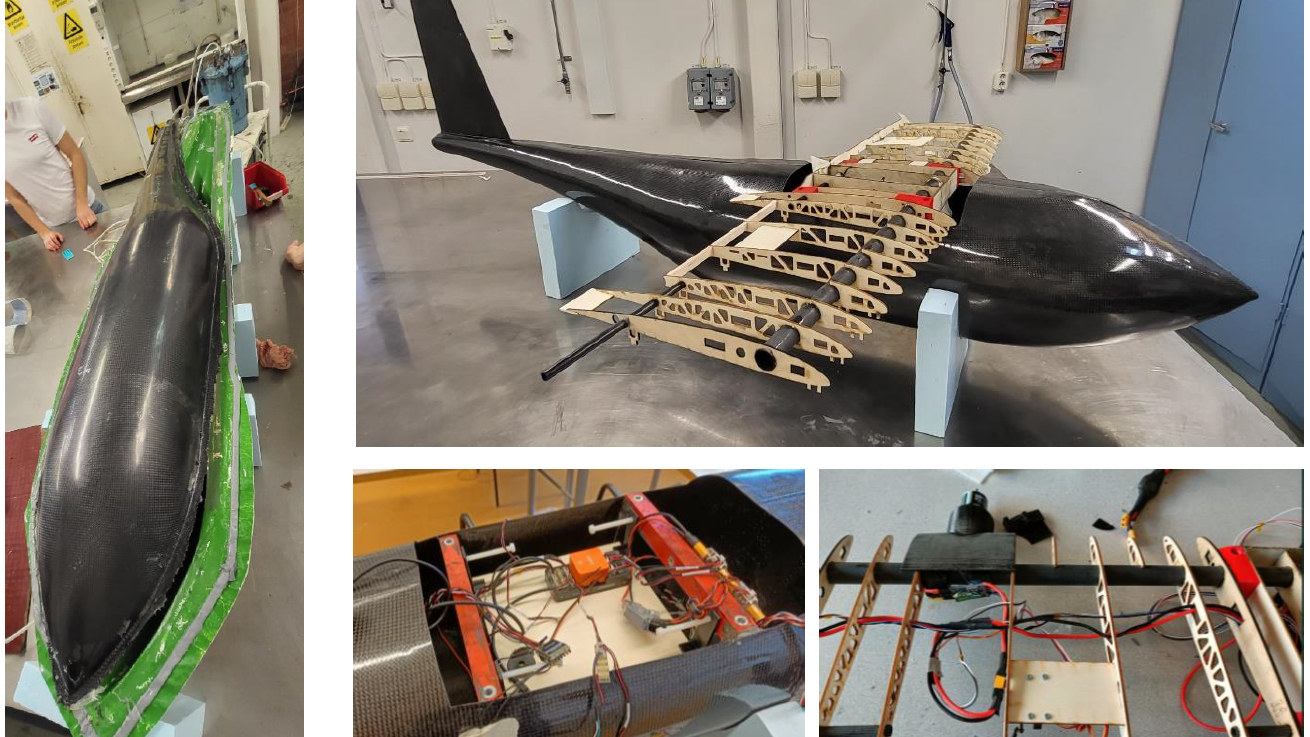
The SHARCEX project focuses on improving underwater operations by integrating advanced autonomous underwater vehicles (AUVs) with human divers. The goal is to enhance safety and efficiency in extreme underwater environments such as defense, rescue operations, and law enforcement. KTH leads the project in collaboration with FMV and Saab, aiming to demonstrate robust AUV-Diver collaborations validated through extensive simulations and experiments.