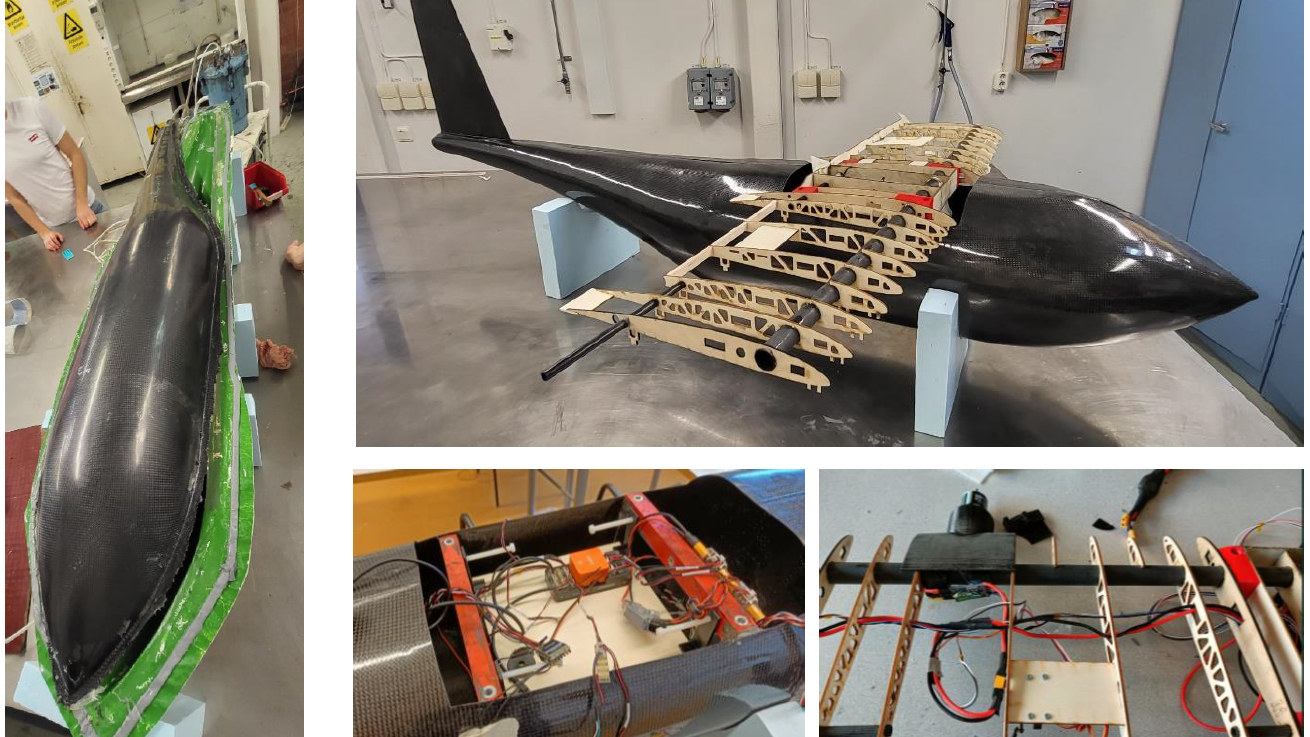
ALPHA, a high altitude UAV Permalink
Design of an autonomous high altitude long endurance UAV to study optical phenomena in the upper atmosphere using scientific imaging instruments. Project under the KTH Space Physics department. Paper presented at ICAS 2022.